商品详情

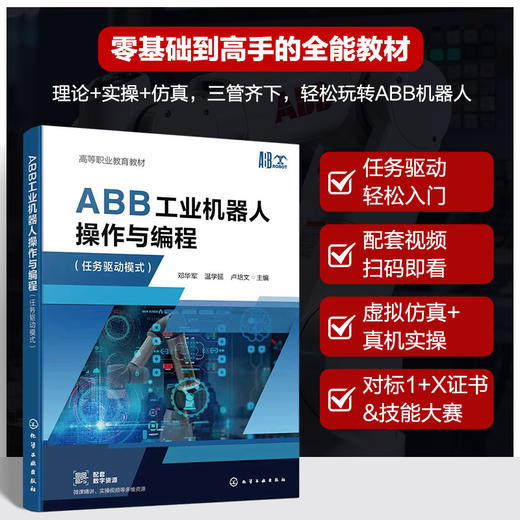
在智能制造浪潮席卷全球的今天,工业机器人作为制造业智能化转型的核心装备,正以前所未有的速度改变着生产模式与产业格局。从汽车制造的精密组装,到电子行业的高速分拣,工业机器人凭借高效、精准、稳定的特性,成为推动产业升级的关键力量。然而,专业技术人才的短缺却成为制约行业发展的瓶颈,编写一本兼具专业性与实用性的工业机器人操作与编程教材,迫在眉睫。本书立足工业机器人技术的实际应用,以;理论+实操+虚拟仿真三轨并行的模式构建知识体系。在内容编排上,遵循从基础认知到高级应用的学习规律,由工业机器人的结构原理、安全操作等基础知识入手,逐步深入到编程调试、系统维护等核心技能。无论是初识工业机器人的初学者,还是渴望精进技术的从业者,都能在书中找到契合自身需求的学习路径。;做中学,学中做是本书的核心理念。每个项目均设置多个实操任务,以ABB IRB120 型工业机器人为典型案例,结合RobotStudio 虚拟仿真软件与真实设备操作,将抽象的理论知识转化为可落地的实践经验。扫描书中二维码,即可获取微课视频、实操演示等丰富的数字资源。这些资源不仅能辅助理解复杂知识点,还打破了时间与空间的限制,让学习更加灵活高效。同时,每章节精心设计的练习题,从理论巩固到项目实战层层递进,帮助读者及时检验学习成果,实现知识的内化与迁移。本书深度融合技能竞赛高职组机器人系统集成应用技术和1+ X 工业机器人集成应用(中级)证书的考核点,并结合岗位要求对高素质技术技能人才的培养需求,着力实现学生;课程教学_技能竞赛_考证_企业上岗的相通培养。本书由赣州职业技术学院邓华军、温学延、卢培文担任主编,赣州职业技术学院温晓珍、段月红、卢愿、宋悦琳,北京华航唯实机器人科技股份有限公司刘自典担任副主编,参与编写的还有赣州职业技术学院朱合钧、梅丽斐、刘景柠、袁学琦、李园海,全书由邓华军统稿。由于编者水平有限,书中难免存在不足之处,恳请广大读者批评指正,共同推动工业机器人教育事业的发展。
编者2025年6月
无
项目1 认识工业机器人 001任务1.1 工业机器人的特点和典型结构 0011.1.1 工业机器人的特点 0021.1.2 工业机器人的典型结构 0031.1.3 认识ABB IRB 120 型工业机器人 005任务1.2 工业机器人的安全操作和注意事项 0111.2.1 工业机器人工作中的安全和注意事项 0111.2.2 示教器的安全操作和注意事项 012任务1.3 工业机器人的开关机 0141.3.1 任务实操:工业机器人的正确开机 0141.3.2 任务实操:工业机器人的正确关机 017任务1.4 用RobotStudio 创建工业机器人虚拟工作站 0191.4.1 任务实操:安装RobotStudio 虚拟仿真软件 0201.4.2 任务实操:创建工作站和机器人控制器解决方案 025练习题 028
项目2 工业机器人的基本操作 030任务2.1 配置示教器的基本操作环境 0302.1.1 任务实操:设定示教器的显示语言 0312.1.2 任务实操:设定工业机器人的系统时间 033任务2.2 查看工业机器人的常用信息和事件日志 0352.2.1 任务实操:查看工业机器人的常用信息 0362.2.2 任务实操:查看工业机器人的事件日志 038任务2.3 工业机器人系统数据的备份和恢复 0392.3.1 任务实操:工业机器人系统数据的备份 0402.3.2 任务实操:工业机器人系统数据的恢复 043任务2.4 工业机器人的手动操作 0452.4.1 认识工业机器人的坐标系 0452.4.2 任务实操:工业机器人运行模式的选择 0472.4.3 任务实操:工业机器人手动运行速度的设置 0512.4.4 任务实操:工业机器人的单轴运动 0552.4.5 任务实操:工业机器人的线性运动 0582.4.6 任务实操:工业机器人的重定位运动 0602.4.7 任务实操:工业机器人工具坐标系的标定 063练习题 073
项目3 工业机器人的I/O 通信 074任务3.1 工业机器人的标准I/O 板和远程I/O 模块 0743.1.1 认识标准I/O 板DSQC652 和远程I/O 模块FR8030 0753.1.2 任务实操:标准I/O 板DSQC652 的配置 0783.1.3 任务实操:远程I/O 模块FR8030 的配置 082任务3.2 I/O 信号的定义和监控 0883.2.1 任务实操:定义数字量输入信号(DI) 0883.2.2 任务实操:定义数字量输出信号(DO) 0933.2.3 任务实操:定义数字量组合输入信号(GI) 0983.2.4 任务实操:定义数字量组合输出信号(GO) 1033.2.5 任务实操: I/O 信号的监控与查看 1083.2.6 任务实操: I/O 信号的强制 1123.2.7 任务实操: I/O 信号的快捷键配置 1153.2.8 任务实操:系统输入/输出信号与I/O 信号的关联 118练习题 124
项目4 工业机器人的基础编程与调试 126任务4.1 认识RAPID 程序 1264.1.1 RAPID 程序的架构 1274.1.2 任务实操:新建模块和新建例行程序 129任务4.2 工业机器人的运动指令 1334.2.1 常用的运动指令及其用法 1344.2.2 任务实操: 利用绝对位置运动指令MoveAbsJ 使机器人回Home 点 1374.2.3 任务实操: 利用线性运动指令MoveL 和关节运动指令MoveJ实现两点间移动 1414.2.4 任务实操:利用圆弧运动指令MoveC 画圆 1474.2.5 位置偏移函数Offs 和工具位置及姿态偏移函数RelTool 的用法 1524.2.6 任务实操: 利用Offs 和RelTool 实现工业机器人的偏移和旋转 1544.2.7 任务实操:工件坐标系的标定 162任务4.3 I/O 控制指令和等待时间指令 1674.3.1 常用的I/O 控制指令及用法 1674.3.2 等待时间指令WaitTime 的用法 1704.3.3 任务实操: 利用Set 和Reset 指令实现快换工具的置位和复位 1714.3.4 任务实操: 利用SetGO 指令实现机器人控制仓储托盘的推出和缩回 175任务4.4 赋值指令和逻辑判断指令 1784.4.1 赋值指令的用法 1794.4.2 常用的逻辑判断指令及其用法 1804.4.3 任务实操: 利用IF 和Compact IF 实现仓储单元空仓位的判定 1834.4.4 任务实操:利用WHILE 循环实现数组的清零 188任务4.5 程序调用指令 1944.5.1 程序调用指令ProcCall 的用法 1944.5.2 任务实操:编写程序实现4个工具的依次取放 195任务4.6 认识工业机器人的程序数据 1994.6.1 常用的数据类型及定义方法 200 4.6.2 任务实操:建立一个num 类型程序数据 2034.6.3 任务实操:建立一个robtarget 类型程序数据 2054.6.4 常用的数学运算指令 2084.6.5 任务实操:轮毂排序 209练习题 218
项目5 工业机器人的高级编程与调试 220任务5.1 带参数的例行程序 2205.1.1 任务实操:创建一个带参数的例行程序 2215.1.2 任务实操:调用带参数的例行程序 225任务5.2 程序跳转指令的用法 228任务实操:编写一个带GOTO 指令的程序 228任务5.3 Function 函数的用法 2335.3.1 任务实操:编写一个带RETURN 指令的程序 2335.3.2 任务实操:编写并调用区间判定函数 237任务5.4 程序的中断与停止 2425.4.1 常用的中断相关指令 2435.4.2 常用的程序停止指令 2445.4.3 任务实操:编写一个TRAP 中断例行程序 245练习题 250
项目6 工业机器人的日常维护与保养 252任务6.1 工业机器人转数计数器的更新操作 2526.1.1 任务实操:工业机器人回机械原点 2536.1.2 任务实操:更新转数计数器 256任务6.2 工业机器人的微校 261任务实操:工业机器人5 轴和6轴的微校 262任务6.3 更换工业机器人本体电池 267任务实操:更换工业机器人本体电池 267任务6.4 程序的导入与导出 2706.4.1 任务实操:程序模块导出至USB 存储设备的方法 2716.4.2 任务实操: USB 存储设备中的程序模块导入至示教器的方法 273练习题 275
参考文献 276
附录 277
- 新华一城书集 (微信公众号认证)
- 上海新华书店官方微信书店
- 扫描二维码,访问我们的微信店铺
- 随时随地的购物、客服咨询、查询订单和物流...