商品详情
书名:智能飞行器设计及应用
定价:79.9
ISBN:9787115687395
作者:刘代军 陈宇 朱峰
版次:第1版
出版时间:2026-01
内容提要:
本书从原理和实际操作两方面入手,主要讲解旋翼无人机的硬件组成、传感系统、飞控算法、智能数据处理系统、智能应用等内容,并讲解了一系列实验,旨在让读者对智能飞行器设计及应用有*的了解,帮助读者在多旋翼无人机的工程实践中更好地完成任务。 本书兼具基础性、综合性和系统性,可以作为飞行器控制与信息工程、无人飞行器系统工程以及无人机应用技术等专业的教材,以及相关专业学生的参考书,也适合多旋翼无人机爱好者阅读。
作者简介:
刘代军,中国航天科工集团有限公司副总经理,郑州航空工业管理学院前院长。陈宇,郑州航空工业管理学院老师,主要研究方向为网络协同制造、数据采集与信号处理。朱峰,郑州航空工业管理学院老师。董振涛,郑州航空工业管理学院老师。
目录:
第1 章 绪论 1
1.1 基本概念 1
1.2 关于多旋翼飞行器 2
第2 章 硬件组成 4
2.1 整体介绍 5
2.1.1 固定翼无人机的基本结构 5
2.1.2 多旋翼无人机的基本结构 6
2.2 飞控 7
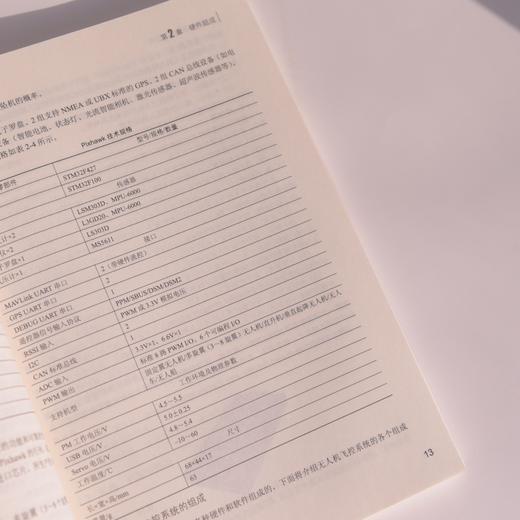
2.2.1 常见的飞控 8
2.2.2 飞控系统的组成 13
2.3 机身、机架与脚架 15
2.3.1 机身 15
2.3.2 机架与脚架 17
2.4 动力系统17
2.4.1 电池 17
2.4.2 电机 20
2.4.3 电调 21
2.4.4 螺旋桨 23
2.5 数传系统 25
2.5.1 功能 25
2.5.2 数传电台 26
2.6 地面站 26
2.6.1 地面站组成 27
2.6.2 控制站 27
2.6.3 地面站功能 28
2.6.4 MAVLink 简介 30
2.6.5 MP 地面站简介 34
2.6.6 硬件设计 38
2.6.7 软件设计 38
2.6.8 课堂实践:波形显示 40
2.7 遥控器和接收机 41
2.7.1 功能 41
2.7.2 参数 42
2.7.3 本书用到的遥控器 43
2.7.4 遥控器和接收机的信号协议 45
2.7.5 硬件设计 48
2.7.6 软件设计 48
2.7.7 课堂实践:遥控器实验 53
第3 章 传感系统 54
3.1 陀螺仪 54
3.1.1 概述 54
3.1.2 陀螺仪结构 56
3.1.3 陀螺仪类型 57
3.1.4 ICM-20689 简介 59
3.1.5 SPI 简介 62
3.1.6 硬件设计 64
3.1.7 软件设计 65
3.1.8 课堂实践:陀螺仪实验 70
3.2 磁力计 70
3.2.1 概述 70
3.2.2 磁力计工作原理 71
3.2.3 课堂实践:磁力计实验 72
3.3 气压计 75
3.3.1 概述 75
3.3.2 气压计分类 76
3.4 GPS 76
3.4.1 组成 77
3.4.2 GPS 在无人机导航中的应用 77
3.5 激光测距 78
3.5.1 原理 78
3.5.2 激光测距的优势 78
3.6 光流 79
3.6.1 光流传感器 79
3.6.2 光流算法 80
3.7 课堂实践:传感器校准实验 80
第4 章 飞控算法 84
4.1 坐标系及姿态解算 84
4.1.1 地球中心坐标系 84
4.1.2 NED 坐标系 85
4.1.3 机体坐标系 85
4.1.4 姿态算法 86
4.1.5 旋转矩阵推导 87
4.1.6 姿态解算流程 90
4.1.7 课堂实践:姿态解析实验 91
4.2 低通滤波 96
4.2.1 概述 96
4.2.2 电路实现原理 96
4.2.3 滤波器特征参数 97
4.2.4 滤波器的传递函数 98
4.2.5 滤波器特征参数求解 99
4.2.6 课堂实践:传感器低通滤波实验 100
4.3 卡尔曼滤波 103
4.3.1 原理 104
4.3.2 卡尔曼滤波的发展背景 104
4.3.3 基于卡尔曼滤波器的PID控制系统结构 105
4.3.4 无人机的回路控制 105
4.4 PID 算法 106
4.4.1 PID 算法原理 106
4.4.2 PID 调试 109
第5 章 智能数据处理系统 110
5.1 智能边缘平台 110
5.1.1 香橙派 110
5.1.2 树莓派 111
5.1.3 英伟达板卡 113
5.1.4 华为加速模块 114
5.2 采集图像数据. 115
5.2.1 环境搭建 115
5.2.2 计算机中的图像 118
5.2.3 摄像头 121
5.2.4 吊舱 121
5.2.5 图像采集实践 122
5.3 双目立体视觉 123
5.3.1 双目相机 124
5.3.2 深度相机 124
5.4 雷达 127
5.4.1 激光雷达 127
5.4.2 多线激光雷达 129
第6 章 智能应用 130
6.1 开源操作系统 130
6.1.1 Linux 操作系统 130
6.1.2 ROS 131
6.2 无人机激光雷达建图 135
6.2.1 无人机激光雷达建图的重要信息. 135
6.2.2 SLAM 建图——激光SLAM. 136
6.3 无人机深度相机建图. 137
6.3.1 无人机深度相机建图的一般步骤 137
6.3.2 SLAM建图——视觉SLAM 138
6.3.3 ORB-SLAM2 140
6.4 无人机自主避障 142
6.4.1 常见的避障技术 142
6.4.2 自主避障过程 143
6.4.3 路径规划算法.144
6.5 无人机智能识别 146
6.5.1 AI 智能识别的步骤、技术及限制 146
6.5.2 智能识别 147
6.6 无人机自主跟踪 148
6.6.1 自主跟踪 148
6.6.2 基于KCF 实现简易的单目标追踪程序 149
第7 章 实验 152
7.1 基础性操作:配置开发环境 152
7.2 基础性操作:建立工程模板 161
7.3 基础性实验:蜂鸣器实验 167
7.4 基础性实验:定时器中断实验 169
7.5 基础性实验:串口通信实验. 173
7.6 拓展实践:加速度计实验 175
7.7 拓展实验:IIC 通信实验——磁力计 176
7.8 拓展实践:无人机遥控飞行实验 180
7.9 拓展实践:无人机对轴平衡调试 183
7.10 拓展实践:无人机定高飞行实验 188
参考文献 191
定价:79.9
ISBN:9787115687395
作者:刘代军 陈宇 朱峰
版次:第1版
出版时间:2026-01
内容提要:
本书从原理和实际操作两方面入手,主要讲解旋翼无人机的硬件组成、传感系统、飞控算法、智能数据处理系统、智能应用等内容,并讲解了一系列实验,旨在让读者对智能飞行器设计及应用有*的了解,帮助读者在多旋翼无人机的工程实践中更好地完成任务。 本书兼具基础性、综合性和系统性,可以作为飞行器控制与信息工程、无人飞行器系统工程以及无人机应用技术等专业的教材,以及相关专业学生的参考书,也适合多旋翼无人机爱好者阅读。
作者简介:
刘代军,中国航天科工集团有限公司副总经理,郑州航空工业管理学院前院长。陈宇,郑州航空工业管理学院老师,主要研究方向为网络协同制造、数据采集与信号处理。朱峰,郑州航空工业管理学院老师。董振涛,郑州航空工业管理学院老师。
目录:
第1 章 绪论 1
1.1 基本概念 1
1.2 关于多旋翼飞行器 2
第2 章 硬件组成 4
2.1 整体介绍 5
2.1.1 固定翼无人机的基本结构 5
2.1.2 多旋翼无人机的基本结构 6
2.2 飞控 7
2.2.1 常见的飞控 8
2.2.2 飞控系统的组成 13
2.3 机身、机架与脚架 15
2.3.1 机身 15
2.3.2 机架与脚架 17
2.4 动力系统17
2.4.1 电池 17
2.4.2 电机 20
2.4.3 电调 21
2.4.4 螺旋桨 23
2.5 数传系统 25
2.5.1 功能 25
2.5.2 数传电台 26
2.6 地面站 26
2.6.1 地面站组成 27
2.6.2 控制站 27
2.6.3 地面站功能 28
2.6.4 MAVLink 简介 30
2.6.5 MP 地面站简介 34
2.6.6 硬件设计 38
2.6.7 软件设计 38
2.6.8 课堂实践:波形显示 40
2.7 遥控器和接收机 41
2.7.1 功能 41
2.7.2 参数 42
2.7.3 本书用到的遥控器 43
2.7.4 遥控器和接收机的信号协议 45
2.7.5 硬件设计 48
2.7.6 软件设计 48
2.7.7 课堂实践:遥控器实验 53
第3 章 传感系统 54
3.1 陀螺仪 54
3.1.1 概述 54
3.1.2 陀螺仪结构 56
3.1.3 陀螺仪类型 57
3.1.4 ICM-20689 简介 59
3.1.5 SPI 简介 62
3.1.6 硬件设计 64
3.1.7 软件设计 65
3.1.8 课堂实践:陀螺仪实验 70
3.2 磁力计 70
3.2.1 概述 70
3.2.2 磁力计工作原理 71
3.2.3 课堂实践:磁力计实验 72
3.3 气压计 75
3.3.1 概述 75
3.3.2 气压计分类 76
3.4 GPS 76
3.4.1 组成 77
3.4.2 GPS 在无人机导航中的应用 77
3.5 激光测距 78
3.5.1 原理 78
3.5.2 激光测距的优势 78
3.6 光流 79
3.6.1 光流传感器 79
3.6.2 光流算法 80
3.7 课堂实践:传感器校准实验 80
第4 章 飞控算法 84
4.1 坐标系及姿态解算 84
4.1.1 地球中心坐标系 84
4.1.2 NED 坐标系 85
4.1.3 机体坐标系 85
4.1.4 姿态算法 86
4.1.5 旋转矩阵推导 87
4.1.6 姿态解算流程 90
4.1.7 课堂实践:姿态解析实验 91
4.2 低通滤波 96
4.2.1 概述 96
4.2.2 电路实现原理 96
4.2.3 滤波器特征参数 97
4.2.4 滤波器的传递函数 98
4.2.5 滤波器特征参数求解 99
4.2.6 课堂实践:传感器低通滤波实验 100
4.3 卡尔曼滤波 103
4.3.1 原理 104
4.3.2 卡尔曼滤波的发展背景 104
4.3.3 基于卡尔曼滤波器的PID控制系统结构 105
4.3.4 无人机的回路控制 105
4.4 PID 算法 106
4.4.1 PID 算法原理 106
4.4.2 PID 调试 109
第5 章 智能数据处理系统 110
5.1 智能边缘平台 110
5.1.1 香橙派 110
5.1.2 树莓派 111
5.1.3 英伟达板卡 113
5.1.4 华为加速模块 114
5.2 采集图像数据. 115
5.2.1 环境搭建 115
5.2.2 计算机中的图像 118
5.2.3 摄像头 121
5.2.4 吊舱 121
5.2.5 图像采集实践 122
5.3 双目立体视觉 123
5.3.1 双目相机 124
5.3.2 深度相机 124
5.4 雷达 127
5.4.1 激光雷达 127
5.4.2 多线激光雷达 129
第6 章 智能应用 130
6.1 开源操作系统 130
6.1.1 Linux 操作系统 130
6.1.2 ROS 131
6.2 无人机激光雷达建图 135
6.2.1 无人机激光雷达建图的重要信息. 135
6.2.2 SLAM 建图——激光SLAM. 136
6.3 无人机深度相机建图. 137
6.3.1 无人机深度相机建图的一般步骤 137
6.3.2 SLAM建图——视觉SLAM 138
6.3.3 ORB-SLAM2 140
6.4 无人机自主避障 142
6.4.1 常见的避障技术 142
6.4.2 自主避障过程 143
6.4.3 路径规划算法.144
6.5 无人机智能识别 146
6.5.1 AI 智能识别的步骤、技术及限制 146
6.5.2 智能识别 147
6.6 无人机自主跟踪 148
6.6.1 自主跟踪 148
6.6.2 基于KCF 实现简易的单目标追踪程序 149
第7 章 实验 152
7.1 基础性操作:配置开发环境 152
7.2 基础性操作:建立工程模板 161
7.3 基础性实验:蜂鸣器实验 167
7.4 基础性实验:定时器中断实验 169
7.5 基础性实验:串口通信实验. 173
7.6 拓展实践:加速度计实验 175
7.7 拓展实验:IIC 通信实验——磁力计 176
7.8 拓展实践:无人机遥控飞行实验 180
7.9 拓展实践:无人机对轴平衡调试 183
7.10 拓展实践:无人机定高飞行实验 188
参考文献 191
- 人民邮电出版社有限公司 (微信公众号认证)
- 人民邮电出版社微店,为您提供最全面,最专业的一站式购书服务
- 扫描二维码,访问我们的微信店铺
- 随时随地的购物、客服咨询、查询订单和物流...









