
商品详情
定价:59.0
ISBN:9787111714903
作者:黎文航 陈书锦 王加友 等
版次:1
内容提要:
焊接机器人约占工业机器人应用总量的40%,是智能制造的重要体现。焊接机器人产业蓬勃发展,对焊接人才培养提出新需求。本书可以帮助焊接相关专业本科生掌握焊接机器人的基本原理和应用技术,初步具备应用焊接机器人的能力。全书共分为9章,内容包括焊接机器人概述、焊接机器人的软件、机器人运动学、机器人驱动器与轨迹规划、焊接机器人编程、机器人传感器技术、焊接机器人的通信与系统集成、焊接机器人的配置、焊接机器人工作站等内容。本书还利用ABB公司的RobotStudio仿真软件实现相关技术的仿真和应用,解决了机器人系统建设成本高、机器人教学理论脱离实践、机器人操作存在安全隐患等问题,并便于实现虚拟仿真式、案例式、项目式教学。本书可作为大学本科“焊接技术与工程”“材料成型及控制工程”(焊接方向)等专业相关课程的教材、硕士研究生“材料加工工程”专业相关课程的参考资料、焊接工程师的培训教材,还可以作为焊接及相关学科教师和工程技术人员从事科研与技术开发工作的参考书。
目录:
目录
前言
第1章焊接机器人概述
1.1焊接自动化与焊接机器人
1.2焊接机器人的发展
1.2.1工业机器人发展历程
1.2.2焊接机器人的发展历程
1.2.3焊接机器人的发展趋势
1.3焊接机器人的结构
1.3.1工业机器人的组成
1.3.2焊接机器人的组成
1.4工业机器人性能参数
1.5焊接机器人的分类
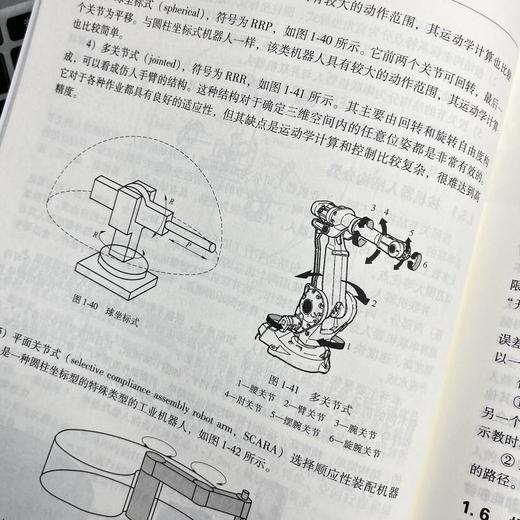
1.5.1按机器人结构分类
1.5.2按机器人控制方式分类
1.6焊接机器人的特点
1.7焊接机器人的安全操作
1.8学习本书的目的和要求
1.9复习思考题
第2章焊接机器人的软件
2.1焊接离线编程软件
2.2ABB RobotStudio机器人仿真
软件
2.2.1RobotStudio功能简介
2.2.2软件安装
2.2.3软件环境简介
2.3焊接机器人虚拟仿真
2.3.1焊接机器人虚拟构建
2.3.2焊接机器人虚拟仿真操作
2.3.3焊接机器人虚拟示教器
操作
2.4复习思考题
第3章机器人运动学
3.1运动学基础
3.1.1机器人工作站中的
坐标系
3.1.2工业机器人位姿描述
3.2齐次变换及运算
3.2.1纯平移变换的表示
3.2.2纯绕轴旋转变换的表示
3.2.3复合变换的表示
3.2.4相对于运动坐标系的
变换
3.3机器人的正逆运动学
3.3.1机器人正运动学方程的D-H
表示法
3.3.2机器人的逆运动学解
3.3.3机器人的退化和灵巧特性
3.4微分运动和速度
3.4.1雅可比矩阵
3.4.2坐标系的微分运动
3.4.3机器人的微分运动
3.5机器人机械臂动力学
3.6RobotStudio中构建常用
坐标系
3.6.1工件坐标系的构建
3.6.2工具坐标系的构建
3.6.3工具数据的构建
3.7复习思考题
第4章机器人驱动器与轨迹
规划
4.1驱动器基本原理
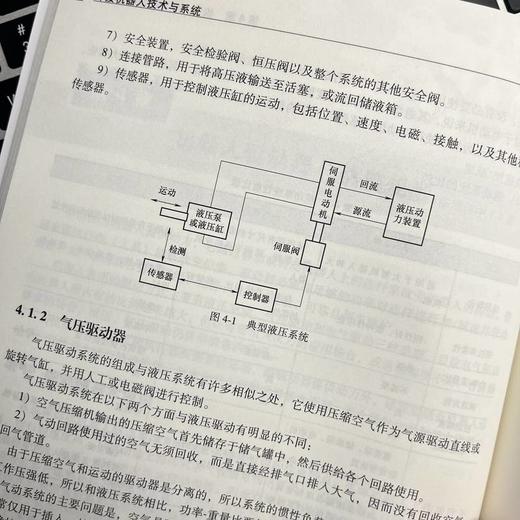
4.1.1液压驱动器
4.1.2气压驱动器
4.1.3电气驱动器
4.2轨迹规划
4.2.1轨迹规划的基本原理
4.2.2目标点的获取
4.2.3机器人关节变化的函数
插值
4.2.4焊接规划
4.3复习思考题
第5章焊接机器人编程
5.1机器人编程概述
5.2数据类型
5.3编程指令
5.4示教编程
5.4.1示教编程的准备
5.4.2示教器编程
- 机械工业出版社旗舰店 (微信公众号认证)
- 扫描二维码,访问我们的微信店铺
- 随时随地的购物、客服咨询、查询订单和物流...









